


Some time ago I backed the Moorebot Scout on Kickstarter, it was advertised as an autonomous robot that could patrol your home.
The shipping was one big mess, with wrong tracking number where the info did not update for weeks. They actually send these via ship from china, which takes weeks, but did not inform the backers about this and they gave completely wrong impressions on when the packages would arrive, resulting in a lot of frustration in the backer community (plus the incredibly unprofessional tracking webseite they did set up where you could find all backer email adresses unencrypted in the website source code. We can only hope their robot coders are far better than their website coders). It was Moorebot’s luck that actually some devices showed up at backers and those shared first videos.
Mine actually arrived last saturday and I did some first tests and want to write a first quick review.
Initial setup was comparatively easy, you have to connect to an AP the robot creates, get it into your local WiFi network (2.4 or 5GHz work).
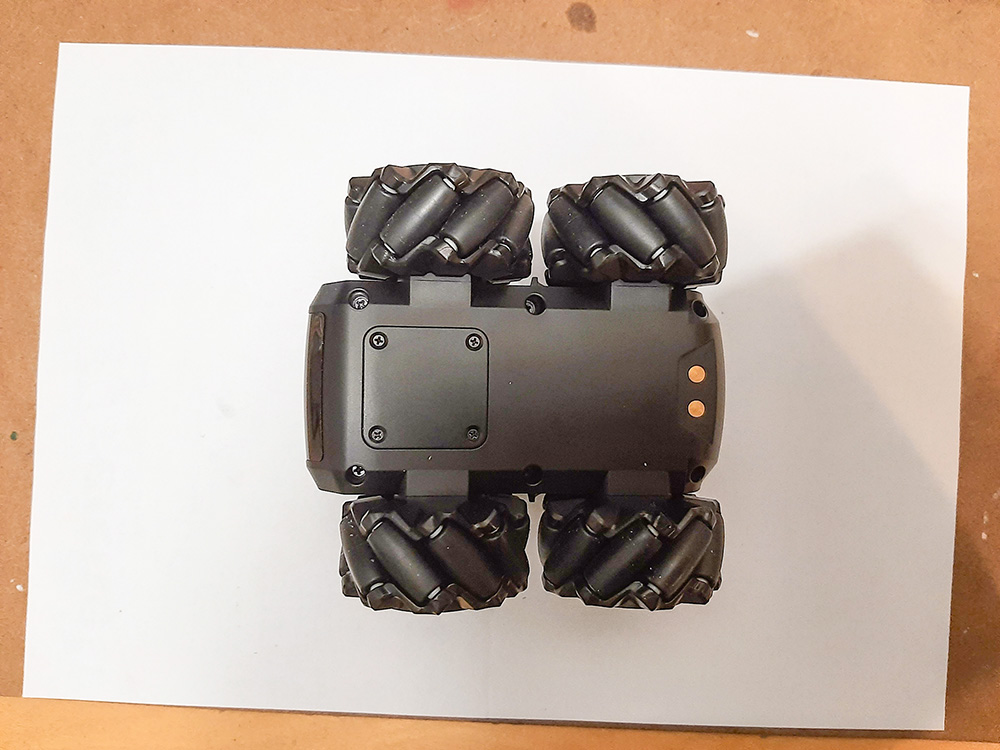
The device itself gives a quality feeling, it is heavy and feels like it’s worth the money. The Mecanum omni-directional wheels are quite impressive at first glance, at second glance another, more rubbery, material for the diagonal rolls would have helped a lot. On smooth surfaces like laminate they are somewhat slippery and quite loud. However, the ability to roll sidewards crablike is definitely a big plus on maneuverability and I think future robot developers should have a look at these kinds of wheels.
When remote controlling it via the app it works okay-ish, there is a clearly noticeable delay between issueing a command and the device actually doing it. This only works because of the good full HD camera that let’s you see where the device is and what acually happens. Nonetheless: those reaction delays are annoying.
The Scout was advertised as an autonomous device, this clearly is not the case. You either control it via remote (which is not autonomous) or you can setup a patrol path for it to follow on it’s own at set times. That also is only semi-autonomous at best, since it is not going off on it’s own as Vector does. It is just following a path the user predefined.
Or, to be truthful here: It should follow said path. I did setup a patrol path and so far the Scout failed to follow it even one single time. It rolls off the charger and then runs in wrong directions, running into obstacles and then rotating to get it even further off it’s path and then crashing into even more obstacles. So far the patrol funktion is completely useless. To me it does not look as if the Scout creates a map like Vector remembering where the charger is. The Scout people say they know that this can be improved and promise to do so in future firmware updates.

There are also problems with WiFi connections, as Scout repeatedly looses it. Even in my setup where the router is nearby, the signal is strong and I checked that there are not heaps of users on the same channel in my neighborhood. Also sometimes the camera goes just black in low light situations, and it looks like this happens because it does not switch to infrared reliably. I guess this also needs to be addressed in a firmware update.
What works good is going back to the charger, it registers that by a chess pattern on it and finds it anytime it sees it. When on “patrol” this is different, since that does not work anyway. Often the robot is stuck somewhere and not able to get back anywhere safe.
On the back of the device sits an expansion UART port under a lid secured by four screws. They promised the device to be open source and that you would be able to create and code expansions for this port, but so far documentation, an API or an SDK is nowhere to be seen. Moorebot promised something like that for “the near future”. At the moment rooting of the IoT device in the app does not work “due to security reasons” regarding to the Moorebot people (that does not make a lot of sense, either it is open source and thus rootable as promised, or it is not – and that would be not what was promised in the Kickstarter campaign).

Compared to Vector, Moorebot Scout is dumb as a brick, not really autonomous and is lacking all cuteness or interactivity, and one has to wonder what exactly is “AI powered” about it. But since it mainly only is a glorified rolling camera anyway, this was to be expected.
I hope Moorebot is able to iron out the kinks with firmware updates in the near future. The build quality looks good, so lets hope the problems are only because of the software. So far the options what you can do with it are quite limited and I fail to see the artificial intelligence. The Scout is not going to replace Vector as my favourite robot anytime soon … 😉
[Update 20220309] It’s confirmed: Scout does not build a map. No wonder he is not able to find his way anywhere. I fail to see the “A.I.” in that …

I’m backer 1,967 and got my unit yesterday and it is very nice from the HW pov
I’d like to see the SDK open-sources ASAP as the Android app is fine for playing around with but not for serious work
Another note is to make sure to switch on Settings->Control->VIO Scout does a much better job of returning correctly to base even on carpeted floors
Without VIO the docking feature doesn’t really work properly
I agree that the hardware makes a good impression, unfortunately the software not so much. I also agree that some kind of SDK needs to be released ASAP, I wonder anyway why something like that is not available since release (and Moorebot reported first shippings in december, that was three months ago – so more than enough time to create an SDK and/or an API documentation. That should have been already worked on during the production process).
I have no problems whatsoever with charger docking.